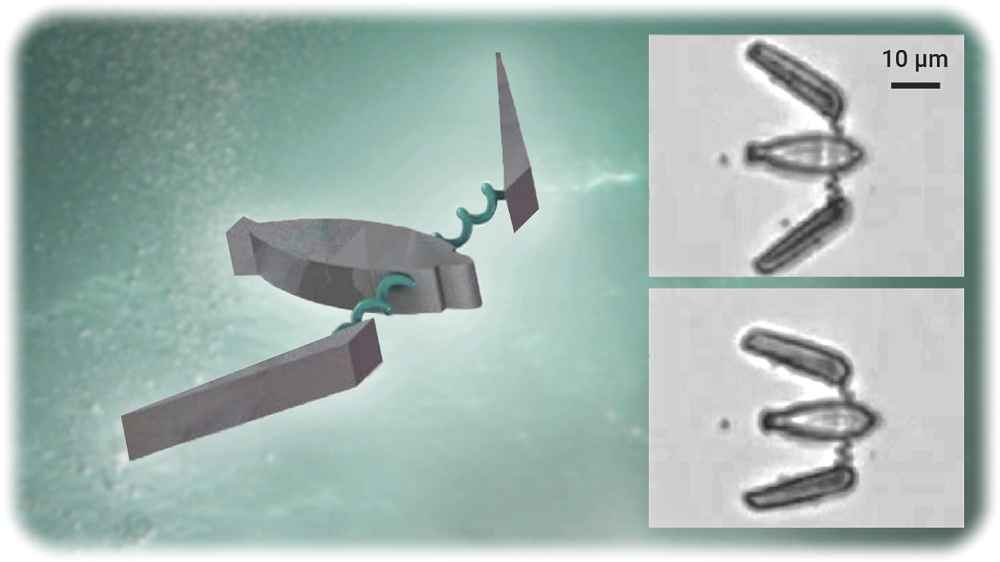
„Mikropinguin“ mit Pikonewton-Flossen schwimmt durch eine Flüssigkeit. Visualisierung: Jacob Müller für die TUC, Mikroskopie-Bilder: aus: Nature Nanotechnology
Wissenschaftler aus Sachsen und China entwickeln Federn für Roboter-Pinguine und Zelldiagnosen
Chemnitz/Dresden/Shenzhen, 4. Januar 2024. Auf ihrem Pfad hin zu „lebendigen“ Medizin-Nanorobotern ist Forschern aus Sachsen und China nach eigenen Angaben ein wichtiger Schritt gelungen: Sie haben winzig kleine Federn konstruiert, die sich magnetisch steuern lassen. Damit hergestellte Piko-Greifer und Roboterpinguine sind so „feinfühlig“, dass sie mit wenigen Billionstel Newton („Pikonewton) Krafteinsatz beispielsweise Spermien oder andere biologische Zellen fassen und abtasten können. Das geht aus einer Mitteilung der Technischen Universität Chemnitz (TUC) hervor.
Prof. Dr. Oliver G. Schmidt ist Pionier bei der Erforschung und Entwicklung extrem kleiner, formbarer und flexibel einsetzbarer Mikrorobotik. Foto: Jacob Müller für die TUC
Magnetfelder können Greifer tief im Körper steuern
Anwendungs-Chancen sehen die beteiligten Wissenschaftler aus Chemnitz, Dresden und Shenzhen unter anderem in der Medizin: „Ferngesteuerte Mikrogeräte, die magnetische Felder nutzen, sind eine besonders vielversprechende Technologie für nicht-invasive medizinische Anwendungen“, meint TUC-Professor Oliver Schmidt, der diese Forschungsarbeit betreut hat. „Dies gilt nun auch für die Mechanik innerhalb dieser ferngesteuerten Mikrogeräte.“
Forscher wollen ihre steuerbaren Federn mit magnetischen Photolacken erzeugen
Die neue Fertigungstechnologie ähnelt den Herstellungsmethoden, die Chipfabriken für die Schaltkreis-Produktion einsetzen. Das Pikofeder-Team setzt dabei auf Photolacke mit magnetischen Nanopartikeln, die an den gewünschten Stellen durch Lithografie-Anlagen belichtet und ausgehärtet und an den überflüssigen Stellen, an denen keine Magnetfelder wirken sollen, entfernt werden. Im Vergleich zu bereits heute verfügbaren Mikrofedern, wie sie beispielsweise für Auto-Airbags hergestellt werden, sind diese neuen Pikofedern deutlich kleiner (rund zehn Mikrometer) und weicher, zudem können sie auch mit Objekten von nur wenigen Millionstel Milligramm hantieren. „Diese Pikofedern haben eine bemerkenswert große und einstellbare Beweglichkeit und können durch Magnetfelder ferngesteuert werden“, betonen die TUC-Forscher. Dies funktioniere „sogar tief im menschlichen Körper, was Gelenkbewegungen von Mikrorobotern sowie Mikromanipulationen weit über den aktuellen Stand der Technik hinaus ermöglicht“.

Die Grafik zeigt einen pinzetten-artigen Mikrogreifer mit den neuen Pikofedern: Je nach Stärke des angelegten Magnetfeldes öffnet oder schließt sich der Greifer. Visualisierung: Jacob Müller für die TUC, Mikroskopie-Bilder: aus: Nature Nanotechnology
Für Diagnose und Therapie im mikroskopischen Maßstab einsetzbar
Nutzbar wären solche winzigen Federn für mehrere Einsatzzwecke: Etwa als Greifer-Antriebe an Nanorobotern, die im menschlichen Körper beispielsweise Gründe für Unfruchtbarkeit diagnostizieren, Gewebeschäden reparieren oder punktgenau Krebszellen angreifen. Sie lassen sich aber auch in einfacherer Ausführung nutzen, um besonders kleine Kräfte an Zellen zu messen.
Werkzeug für künstliches Leben?
Letztlich sind die Pikofedern auch ein Bauelement für mikroskopisch kleines „künstliches Leben“, das Prof. Schmidt und sein Team mit Methoden der Mikroelektronik, des Mikro-Origami und ganz neuen Technologien erschaffen wollen. „Die Möglichkeit, mikroskopische Einbaufedern zu integrieren, wird auch die wachsenden Kompetenzen der TU Chemnitz im Bereich der mikroelektronischen Morphogenese und des künstlichen Lebens um ein neues Werkzeug erweitern“, meint Prof. John McCaskill vom „Europäischen Zentrum für lebende Technologien“, in dem auch die Chemnitzer Uni ein Mitglied ist. Konkret an der Pikofeder-Designstudie beteiligt waren neben der TUC auch das Leibniz-Institut für Festkörper- und Werkstoffforschung (IFW) und Forscher des „Shenzhen Institute of Advanced Technology“ (Siat) der chinesischen Wissenschaftsakademie.
Prof. Oliver Schmidt vom IFW Dresden und von der TU Chemnitz hatte seinerzeit bereits den weltweit kleinsten steuerbaren Roboter mit Hilfe von Mikroelektronik-Technologien gebaut – hier eine Visualisierung. Abb.: TU Chemnitz
Oliver Schmidt und seine Kollegen in Chemnitz und Dresden hatten bereits in der Vergangenheit mit Mikrotechnologien für Schlagzeilen gesorgt. So entwickelten die beispielsweise den weltweit kleinsten steuerbaren Raketenantrieb und den kleinsten elektronischen Roboter.
Autor: Oiger
Quellen: TUC, Nature Nanotechnology
Wissenschaftliche Publikation:
„3D nanofabricated soft microrobots with super-compliant picoforce springs as onboard sensors and actuators“ von Haifeng Xu, Song Wu, Yuan Liu, Xiaopu Wang, Artem K. Efremov, Lei Wang, John S. McCaskill, Mariana Medina-Sánchez und Oliver G. Schmidt, in: „Nature Nanotechnology“ (2024), Fundstelle im Netz: https://doi.org/10.1038/s41565-023-01567-0
Zum Weiterlesen:
Mikroroboter-Schmidt will winzige Cyborgen bauen

Ihre Unterstützung für Oiger.de!
Ohne hinreichende Finanzierung ist unabhängiger Journalismus nach professionellen Maßstäben nicht dauerhaft möglich. Bitte unterstützen Sie daher unsere Arbeit! Wenn Sie helfen wollen, Oiger.de aufrecht zu erhalten, senden Sie Ihren Beitrag mit dem Betreff „freiwilliges Honorar“ via Paypal an:
Vielen Dank!
Du muss angemeldet sein, um einen Kommentar zu veröffentlichen.