Nanowissenschaftler Boris Rivkin mit seinen anpassungsfähigen Mikroelektronik-Muskeln im Hintergrund. Foto: IFW Dresden / TU Chemnitz
Forscher aus Dresden und Chemnitz entwickeln anpassungsfähige Mikroelektronik
Dresden/Chemnitz, 13. Februar 2021. Nanotech-Experten vom Leibniz-Institut für Festkörper- und Werkstoffforschung (IFW) Dresden und von der TU Chemnitz haben intelligente Mikromuskeln entwickelt, die sich mittels künstlicher Sinne an ihre Umgebung anpassen können. Diese adaptive Mikroelektronik könne künftig „fühlende“ OP-Roboter, bessere Mensch-Maschine-Schnittstellen und Therapieansätze bei Nervenschäden ermöglichen, sind die Studienautoren Prof. Oliver Schmidt und Boris Rivkin überzeugt.

Prof. Dr. Oliver G. Schmidt vom Leibniz-Institut für Festkörper- und Werkstoffforschung Dresden. Foto: privat
Bessere Nervenimplantate und fühlende Roboterarme in Sicht
„Der entscheidende nächste Schritt ist der Übergang von der bisher flachen Architektur zu dreidimensionalen Mikro-Robotern“, kündigte Boris Rivkin an. In früheren Experimenten hatten die Sachsen beschichtete Polymerfolien dazu zu bringen, sich selbstorganisiert zu 3D-Strukturen zu falten oder zu rollen. „Wir werden solche Materialien mit adaptiver Elektronik ausstatten, um Systeme wie robotisierte Mikro-Katheter, kleinste Roboterarme und formbare neuronale Implantate zu entwickeln, die einer digitalen Instruktion folgend semi-autonom handeln.“
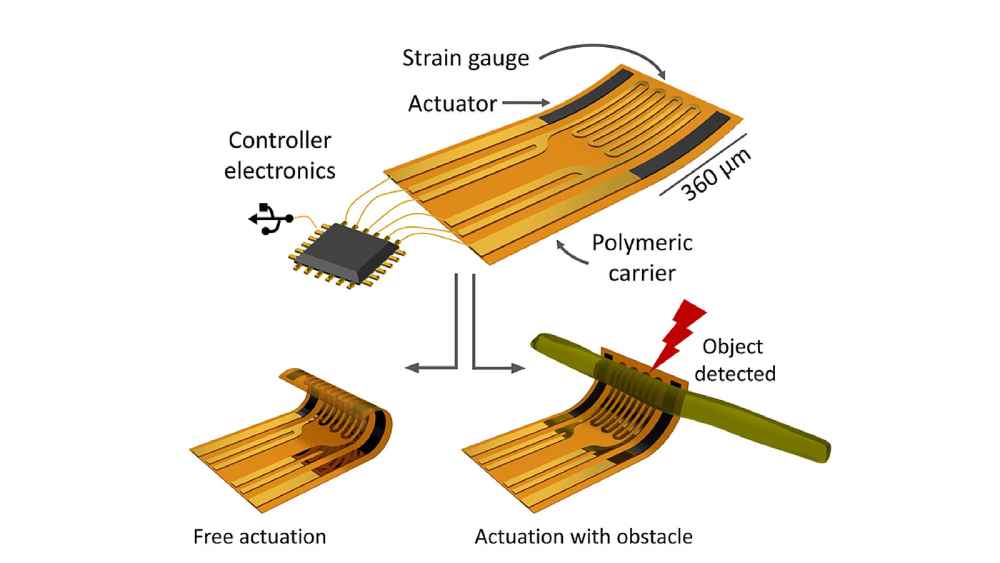
Der obere Teil der Grafik zeigt den künstlichen Muskel (Aktuator) aus einer Polymerfolie, die mit Sensoren und einem Mikrocontroller gekoppelt ist. Unten ist die Reaktion der adaptiven Elektronik auf ein Objekt wie etwa ein Nervenbündel zu sehen. Grafik: IFW Dresden/TU Chemnitz
Polymerfolien mit Sensoren und Chips gekoppelt
Für ihre intelligenten, anpassungsfähigen und „sehenden“ Muskeln hat ein internationales Team um Schmidt und Rivkin hauchdünne Folien aus dem Polymer „Polypyrrol“ (PPy) eingesetzt, die sich durch niedrige Spannungen unter einem Volt umformen lassen. Diese haben sie dann mit kleinen Sensoren gekoppelt und einem Mikrocontroller, der die Sensordaten von der Umgebung auswertet und dann Steuersignale für die künstlichen Muskeln aussendet. Solche Mikromaschinen können zum Beispiel im medizinischen Einsatz beschädigte Nervenstränge schonend umklammern, ein bioneurales Interface etablieren und zur Genesung des Patienten beitragen. Auch sind damit bessere Operations-Roboter möglich, deren Greifer und Werkzeuge ähnlich wie Chirurgenhände „fühlen“, wie fest sie beispielsweise auf einem Organ aufliegen oder wieviel Druck sie für einen Eingriff ausüben müssen.
Prof. Oliver Schmidt vom IFW Dresden und von der TU Chemnitz hat den weltweit kleinsten steuerbaren Roboter mit Hilfe von Mikroelektronik-Technologien gebaut – hier eine Visualisierung. Abb.: TU Chemnitz
Kleinste Düsenroboter der Welt könnte Gallenkrebs-Prophylaxe revolutionieren
Prof. Oliver Schmidt und seine Kollegen in Dresden und Chemnitz hatten in der Vergangenheit unter anderem mit dem kleinsten steuerbaren Raketenroboter der Welt und anderen Mikro- und Nanomaschinen für Furore gesorgt. Gemeinsam mit Medizinern des Uniklinikums Dresden wollen sie solche Winzlinge auf den Einsatz im menschlichen Körper vorbereiten. Eines der Projekte zielt darauf, mit Nanorobotern auch Gallenkrebs-Vorsorgeuntersuchungen möglich zu machen, ähnlich der sehr erfolgreichen und inzwischen breit etablierten Darmkarzinom-Prophylaxe, dank derer diese Krebsart mittlerweile als vermeidbar gilt.
Autor: Heiko Weckbrodt
Quellen: TUC, Oiger-Archiv, IFW
Zum Weiterlesen:
Mikroroboter gegen Gallenkrebs
3D-Elektronik entsteht durch Magnet-Origami
Wissenschaftliche Publikation:
Publikation: Boris Rivkin et al. Shape‐Controlled Flexible Microelectronics Facilitated by Integrated Sensors and Conductive Polymer Actuators. Advanced Intelligent Systems (01/2021). DOI: https://doi.org/10.1002/aisy.2

Ihre Unterstützung für Oiger.de!
Ohne hinreichende Finanzierung ist unabhängiger Journalismus nach professionellen Maßstäben nicht dauerhaft möglich. Bitte unterstützen Sie daher unsere Arbeit! Wenn Sie helfen wollen, Oiger.de aufrecht zu erhalten, senden Sie Ihren Beitrag mit dem Betreff „freiwilliges Honorar“ via Paypal an:
Vielen Dank!
Du muss angemeldet sein, um einen Kommentar zu veröffentlichen.