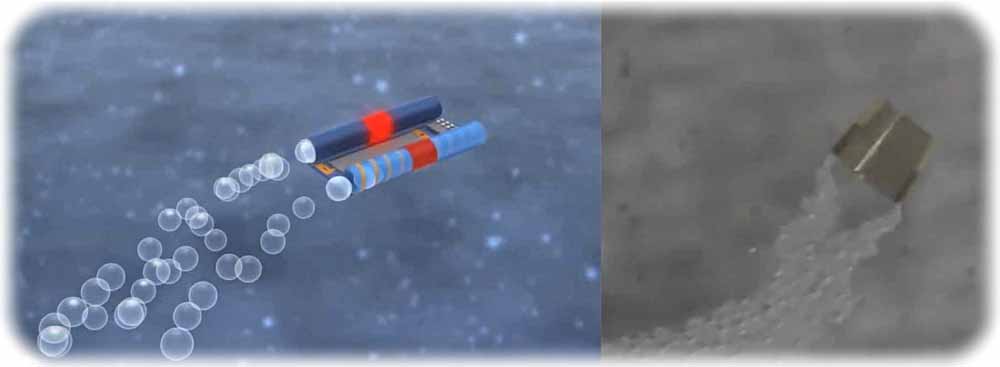
Der mikroelektronische Roboter der TU CHemnitz ist 800 Mikrometer lang und hat zwei Sauerstoff-Bläschen-Antriebe. Links ist er in einer Visualisierung, rechts als Mikroskopaufnahme zu sehen. Abb. (2): TU Chemnitz
TU Chemnitz treibt Mikro-U-Boot durch zwei Sauerstoff-Triebwerke an
Chemnitz, 22, März 2020. Forscher aus Sachsen und China haben den – laut eigenen Angaben – kleinesten elektronisch steuerbaren Roboter der Welt konstruiert. Das hat Oliver G. Schmidt von der TU Chemnitz mitgeteilt, der das Projekt geleitet hat. Solche Mikroroboter wären etwa für Reisen durch den menschlichen Körper und den gezielten Medikamenten-Transport zu bestimmten Organteilen einsetzbar – wobei das Team die Antriebstechnik dafür noch weiterentwickeln muss.
Werbevideo für "Die Reise ins Ich" (1987) von Warner:

Science Fiction der 1960er beflügelte über Jahrzehnte die Ingenieure
Schon seit über 50 Jahren beflügelt Wissenschaftler die Idee, winzige U-Boote oder Roboter zu bauen, die beispielsweise kaputte Lungenbläschen im Menschen reparieren oder Metastasen direkt und vor Ort am krebszerfressenen Organ beseitigen können. Erinnert sei an einschlägige Science-Fiction-Filme wie „Die phantastische Reise“ aus dem Jahr 1966 oder „Die Reise ins Ich“ von 1987. Inzwischen ist diese Technologie in greifbare Nähe gerückt – wenn es auch weiter nicht möglich ist, verkleinerte Menschen an Bord eines solchen Mikro-U-Bootes zu schleusen.
Video vom Roboter (TU Chemnitz):

Auch ein Greifarm ist an Bord
Statt dessen hat das Team um Prof. Oliver G. Schmidt, der an der TU Chemnitz und am Leibniz-Institut für Festkörper- und Werkstoffforschung (IFW) Dresden forscht, auf die moderne Robotik und Nanoelektronik gesetzt. Die Wissenschaftler konstruierten einen 0,8 Millimeter langen und 0,14 Millimeter hohen Roboter. Der ist durch zwei steuerbare Sauerstoff-Triebwerke bewegbar und steuerbar, hat sogar eine Art winzigen Greifarm und braucht keine Batterie.
Strom durch induktive Übertragung
Die Wissenschaftler übertragen die nötige Energie für den Roboter drahtlos per Induktion, ähnlich wie moderne Smartphone-Ladestationen. Die zwei Antriebskanäle sind aufgerollte Mikroröhrchen – eine Spezialität von Projektleiter Schmitz. Indem sie Wasserstoffperoxid gezielt erwärmen, können die Forscher Sauerstoff in unterschiedlichem Druck durch die beiden Antriebsröhrchen treiben. Dadurch ist der Roboter steuerbar. Die Steuertechnik und die Greifarme basieren auf biegsamer Elektronik aus Polymeren.

Prof. Dr. Oliver G. Schmidt Foto: Jacob Müller für die TU Chemnitz
Forscher sehen Chancen als Medizinroboter
„Denkbar ist so der Einsatz von biomedizinischen Sensoren und Aktoren, die Anwendungen in den Bereichen der Mikro-Robotik und Medizintechnik ermöglichen“, heißt es von der Uni Chemnitz. „Beispiele hierfür sind das gezielte Verabreichen von Medikamenten oder die Diagnose von Krankheiten direkt im Organismus.“
Team muss aber neuen Treibstoff finden
Nach Einschätzung der Entwickler ist das die kleinste Roboterlösung dieser Art weltweit. Zwar gebe es auch schon Mikromotoren und andere Komponenten in dieser Größenklasse, aber kein solch komplexes System. Arbeiten müssen die Forscher aber noch am Antrieb: Ihr Treibstoff Wasserstoffperoxid wäre für den Einsatz im menschlichen Körper ungeeignet. Hier muss ihnen noch eine andere Lösung einfallen.
Chinesen und Sachsen forschten zusammen
An der Entwicklung beteiligt waren neben der TU Chemnitz und dem IFW Dresden außerdem die TU Dresden und die Chinesische Akademie der Wissenschaften Changchun.
Autor: Heiko Weckbrodt
Quellen: TU Chemnitz, IFW Dresden, Wikipedia
Wissenschaftliche Veröffentlichungen dazu:
A flexible microsystem capable of controlled motion and actuation by wireless power transfer by Oliver G. Schmidt et al.: https://www.nature.com/articles/s41928-020-0384-1
Rolled-up nanotech on polymers: from basic perception to self-propelled catalytic microengines by Oliver G. Schmidt et al. [Chem. Soc. Rev. 40, 2109 (2011)]: https://doi.org/10.1039/C0CS00078G

Ihre Unterstützung für Oiger.de!
Ohne hinreichende Finanzierung ist unabhängiger Journalismus nach professionellen Maßstäben nicht dauerhaft möglich. Bitte unterstützen Sie daher unsere Arbeit! Wenn Sie helfen wollen, Oiger.de aufrecht zu erhalten, senden Sie Ihren Beitrag mit dem Betreff „freiwilliges Honorar“ via Paypal an:
Vielen Dank!
Du muss angemeldet sein, um einen Kommentar zu veröffentlichen.