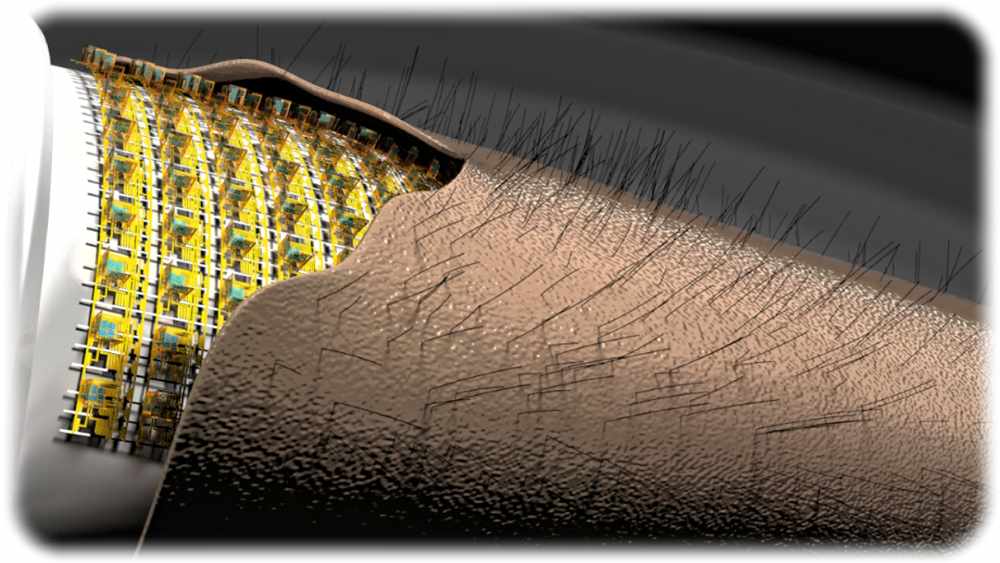
Hochintegrierte flexible mikroelektronische 3D Sensorik nimmt Bewegung von Härchen auf künstlicher Haut wahr. Grafik: Forschungsgruppe Prof. Dr. Oliver G. Schmidt für die TU Chemnitz
Hochintegrierte flexible mikroelektronische 3D Sensorik nimmt Bewegung von Härchen auf künstlicher Haut wahr. Grafik: Forschungsgruppe Prof. Dr. Oliver G. Schmidt für die TU Chemnitz