Schwarmroboter schnüffeln sich durch Katastrophen
Dresdner TU-Professoren wollen eine neue Robotikindustrie in Sachsen anschieben
Dresden, 20. Mai 2020. Damit sich Katastrophenhelfer bei Notfällen schneller ein Bild von der Lage machen und mehr Menschenleben retten können, entwickeln Informatiker der TU Dresden derzeit künstliche Schwärme aus Schnüffelrobotern und Drohnen. Das geht aus einer Mitteilung der Dresdner Exzellenz-Uni hervor.
Sniff-Bots vernetzen sich mit Drohnen und Sensoren per 5G-Funk
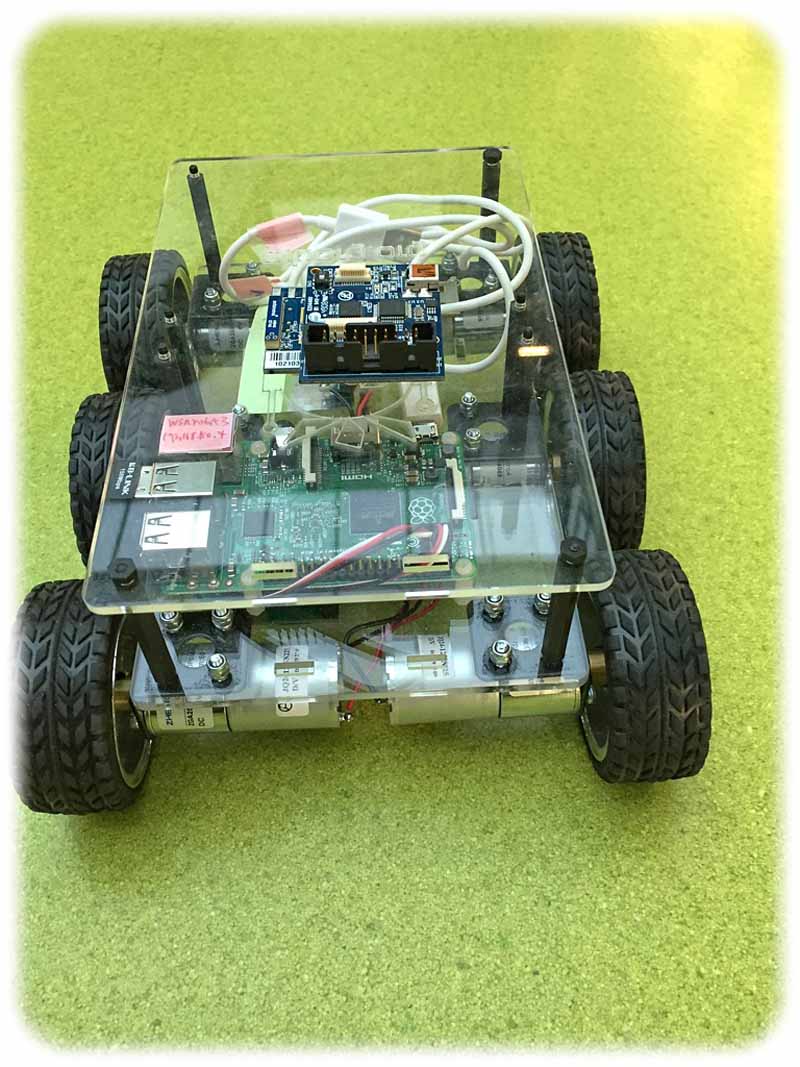
Die am der Professur für Rechnernetze entworfenen „Sniffbots“ können durch künstliche Augen, Ohren und Nasen ihre Umwelt am Boden erkunden, sich aber auch Drohnenkameras in der Luft und anderen Sensoren im Umfeld spontan zu Schwärmen verbinden. Dafür bauen sie selbstständig mit per 5G-Mobilfunk Netzwerke auf. Bei einem Chemieunfall zum Beispiel können sie die Lecks erschnüffeln, an denen giftige Gase austreten, den Gefahrenradius für Menschen mit Hilfe ihrer „fliegenden Augen“ abschätzen und dann Roboterfreunde alarmieren, die die Löcher versiegeln. Solcher Roboterschwärme wollen die Forscher künftig auch befähigen, Bomben zu entschärfen oder nach Erdbeben Eingeschlossene aus dem Schutt zu bergen.
Selbstständige Entscheidungen gefragt
„Sniffbots sind hochintelligent“, betonte Teilprojektleiter Dr. Waltenegus Dargie. „Sie schätzen anhand der gesammelten Daten die Situation ein und entscheiden selbst, zu welchem Zeitpunkt Daten kritisch sind und übermittelt werden müssen oder wann sie beispielsweise Energie sparen können.“ Möglich machen dies spezielle Algorithmen, die die Dresdner Informatiker dem Schwarm eingepflanzt haben.
„Wir haben verschiedene Roboter mit unterschiedlicher Größe und Kapazität“, berichtet Waltenegus Dargie. „Die kleineren sind flexibel zu bewegen. Einige sind bereits in der Lage, komplexe Aufgaben auszuführen.“

Projektleiter Aßmann rechnet mit expandierender Fernarbeits-Industrie
Projektleiter Prof. Uwe Aßmann sieht hier eine ganze neue Roboterwirtschaft wachsen, in der Sachsen eine führende Rolle übernehmen könne: „Ich schätze, dass in fünf bis zehn Jahren eine Industrie für Fernarbeit existiert, für Fernwartung, Fernsensorik, Fernabnahme und Fernmanipulation“, erklärte er. „Sächsische Firmen sollten in diesen sich entwickelnden Markt investieren, und gerade die Corona-Krise stellt einen enormen Schub in diese Richtung dar.“
Das sächsische Wissenschaftsministerium fördert die Sniffbots mit knapp zwei Millionen Euro, teilte die TU mit.
Autor: hw
Quelle: TUD

Ihre Unterstützung für Oiger.de!
Ohne hinreichende Finanzierung ist unabhängiger Journalismus nach professionellen Maßstäben nicht dauerhaft möglich. Bitte unterstützen Sie daher unsere Arbeit! Wenn Sie helfen wollen, Oiger.de aufrecht zu erhalten, senden Sie Ihren Beitrag mit dem Betreff „freiwilliges Honorar“ via Paypal an:
Vielen Dank!