Fühlende Roboterhand aus künstlicher Haut, Neuronen und Muskeln
Poweron aus Dresden und Auckland will Roboter neue Jobs in Pflege, Eierfabriken und Obstgärten erschließen
Dresden, 27. Januar 2023. Die auf taktile Roboter spezialisierte Uni-Ausgründung „Poweron“ hat den ersten Demonstrator eines Roboter-Greifarms mit künstlichen Muskeln, Neuronen und Haut fertiggestellt. Das hat die TU Dresden, aus der sich das sächsisch-neuseeländische Unternehmen gemeinsam mit der University of Auckland im Jahr 2019 ausgegründet hatte. Der Greifer soll die Art und Weise, wie Roboter mit Objekten hantieren und mit Menschen interagieren können auf eine neue Stufe heben.
Trend geht zum Alltagsroboter
„Wir sehen einen starken Trend hin zur Automatisierung in allen Industriebereichen und werden diesen auch sehr bald in unserem Alltag erleben“, ist Poweron-Chef Markus Henke überzeugt. Denn wenn Roboter beispielsweise Hand eines Menschen erfühlen und mit richtig dosierter Kraft schütteln können, wenn sie lernen, auch Obst so zu sortieren, dass hinterher keine Druckstellen entstehen, dann eröffnen sich den künstlichen Helfern auch neue berufliche Perspektiven: Sie könnten dann beispielsweise Eier oder Reagenzgläser umsortieren, Gummiprodukte aus Spritzgussformen entformen, Obst und Gemüse ernten oder sogar im Haushalt und in der Altenpflege arbeiten. Mit Blick auf den Fachkräftemangel sieht Henke hier ein großes Potenzial
Keine Gelenke, aber artifizielle Muskeln und Neuronen
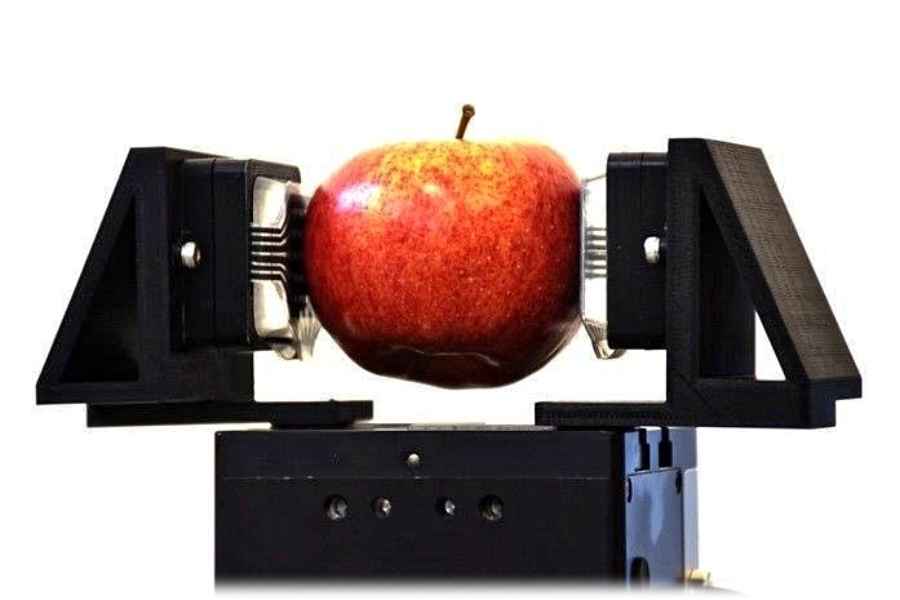
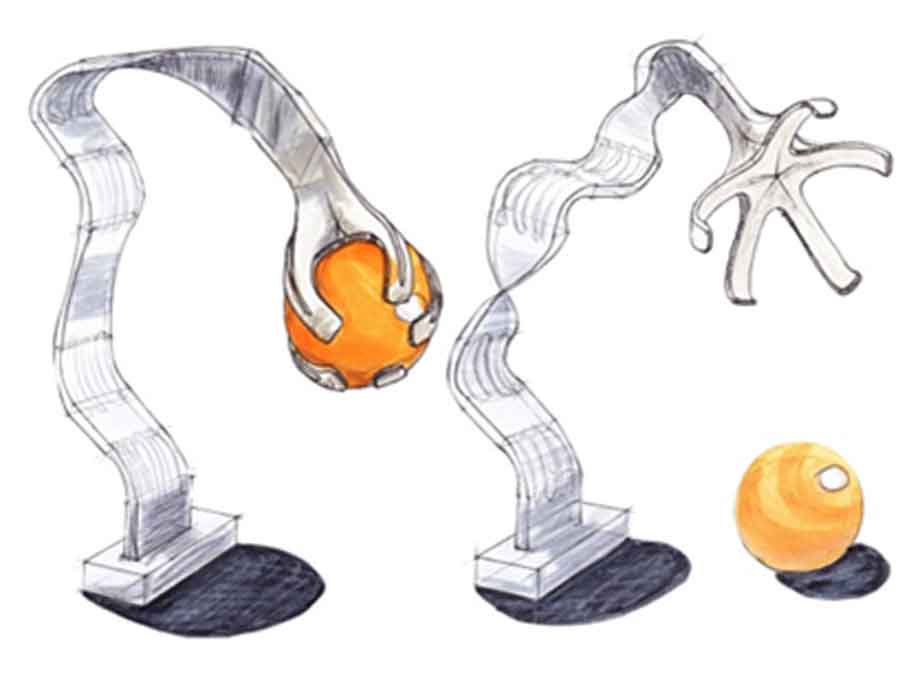
Möglich machen sollen die Kunststoffmuskeln und Haut sowie künstliche Neuronen, die für eine dezentrale Steuerung der Roboterhände sorgen. Der nun vorgestellte Greifer sei aus flexiblen Materialien gedruckt, enthalte keinerlei klassische Gelenke und sei mit einer taktilen Haut ausgestattet, die erfühlen könne, wie und wo ein Objekt gegriffen wurde, heißt es in der Uni-Mitteilung.
Auch Industrierobotern sollen Tastsinn bekommen
Eine „fühlende“ Fingerspitze für Industrieroboter soll das erste praxisreife Produkt von Poweron werden. Und perspektivisch will das sächsisch-neuseeländische Team auch stärker in der vernetzten Robotik aktiv werden. Unter anderem ist Poweron Partner im Großforschungsprojekt „6G-life“. Diese gemeinsame Vorhaben der Technischen Universitäten Dresden und München zielt vor allem auf innovative Mensch-Maschine-Schnittstellen.
Autor: hw
Quellen: TUD, Oiger-Archiv, Poweron, 6G-life

Ihre Unterstützung für Oiger.de!
Ohne hinreichende Finanzierung ist unabhängiger Journalismus nach professionellen Maßstäben nicht dauerhaft möglich. Bitte unterstützen Sie daher unsere Arbeit! Wenn Sie helfen wollen, Oiger.de aufrecht zu erhalten, senden Sie Ihren Beitrag mit dem Betreff „freiwilliges Honorar“ via Paypal an:
Vielen Dank!