Der Mond liegt auf Teneriffa
Fernando Gandía/GMV

ESA testet lunare Erkundungsroboter auf der Vulkaninsel
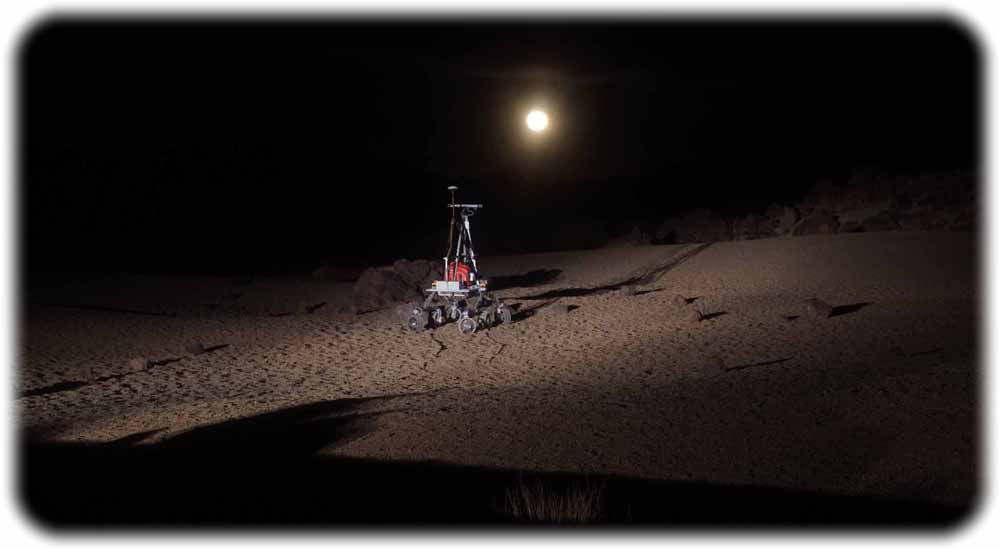
Mt. Teide/Teneriffa, 23. Juli 2017. ESA-Ingenieure haben jetzt auf Teneriffa zwei Mond-Roboterfahrzeuge bei Nacht getestet. Laut der europäischen Raumfahrtagentur wurde die spanische Ferieninsel als Teststrecke ausgesucht, weil die Gegend um den Vulkan Teide sehr den Bedingungen auf dem Mond ähnelt.
Testfahren bei Nacht simulieren Fahrten nahe am Mondpol
Die Testfahrten setzten die Ingenieure für die Nachtstunden an, um auszuprobieren, wie sich die beiden ferngesteuerten rollenden Messroboter in der Pol-Gegend des Monds zurechtfinden, nahe an der stets dunklen Rückseite des Erdtrabanten: dort, wo die Sonne niedrig steht, nur wenig Energie durch Solarpaneele eingesammelt werden kann, die Schatten lang sind und das Licht düster. „Bis heute haben planetare Rover immer bei Tageslicht operiert“, betonte ESA-Robotik-Ingenieur Martin Azkarate. „Aber für vorgeschlagene Missionen zu den Polargegenden des Mondes sind die Lichtverhältnisse viel komplizierter.“
Zwei Rover im Gespann
Dabei setzen die Experten auf ein Gespann zweier unterschiedlicher Mondmobile: Der „Heavy Duty Planetary Rover“ (HDPR) fährt recht schnell und agiert als Scout für das nachfolgende „Rover Autonomy Testbed“ (RAT). Zusammen können sie eine fremde Umgebung mit ganz unterschiedlichen Sensoren abtasten: Mit Laser, mit Laser-Radar (Lidar), Stereokameras und dergleichen mehr.
Ferngesteuerte Mission geplant
Diese Sensoren-Phalanx wird auch nötig sein, denn die Roboter werden – anders als zum Beispiel der autonom agierende NASA-Marsrover Curiosity“ – ferngesteuert sein. Weil der Mond eine reichliche Lichtsekunde von der Erde entfernt ist, beträgt die Zeitverzögerung zwischen einem neuen Navigations-Befehl von der Erde und der Rückmeldung vom Mond mindestens zwei Sekunden – und in dieser Spanne können schon Hinternisse aufgetaucht sein, die einen Rover ganz lahm legen. Auch deshalb sollen HDPR und RAT zusammen die Umgebung so intensiv und vorausschauend scannen. hw

Ihre Unterstützung für Oiger.de!
Ohne hinreichende Finanzierung ist unabhängiger Journalismus nach professionellen Maßstäben nicht dauerhaft möglich. Bitte unterstützen Sie daher unsere Arbeit! Wenn Sie helfen wollen, Oiger.de aufrecht zu erhalten, senden Sie Ihren Beitrag mit dem Betreff „freiwilliges Honorar“ via Paypal an:
Vielen Dank!