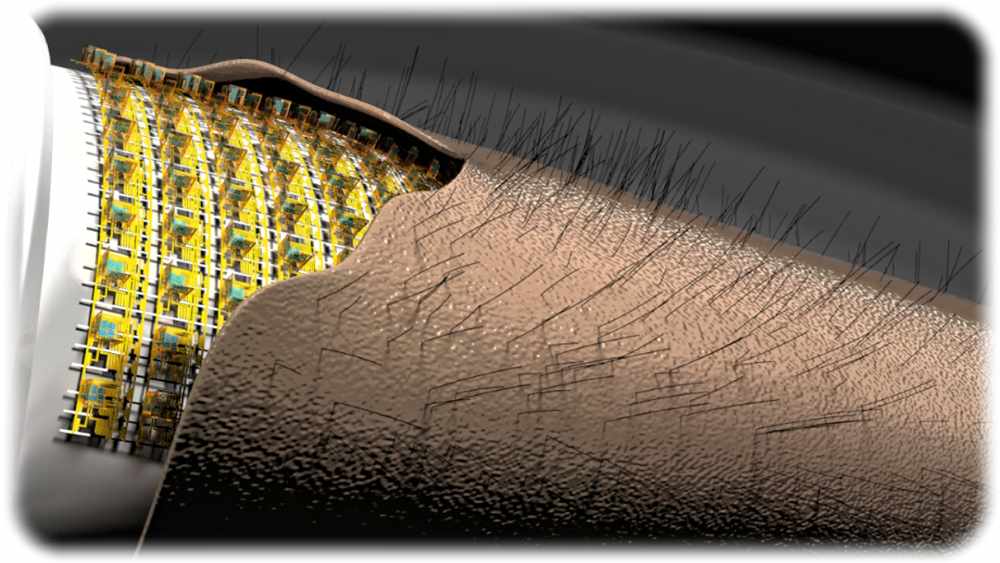
Hochintegrierte flexible mikroelektronische 3D Sensorik nimmt Bewegung von Härchen auf künstlicher Haut wahr. Grafik: Forschungsgruppe Prof. Dr. Oliver G. Schmidt für die TU Chemnitz
Kleine Origami-Sensorhaare lassen Roboter erahnen, von wo der Mensch naht
Chemnitz/Dresden, 2. Mai 2022. Die meisten heutigen Roboter arbeiten in Industriebetrieben zum Schutz ihrer menschlichen Kollegen hinter hohen Gitter- oder Sensorzäunen. Das ist bisher meist notwendig, weil sich die stählernen Gesellen ihrer Stärke nicht bewusst sind und durch eine rasche Bewegung einen nahenden Menschen schwer verletzen könnten. Daher arbeiten Forscher in Chemnitz und Dresden bereits seit geraumer Zeit an einer künstlichen Haut, durch die kollaborative Roboter (Kobots) in Zukunft fühlen und rasch reagieren können, wenn ihnen ein verletzlicher „organischer“ Kollege zu nahe kommt.
Video (TUC): So funktioniert die elektronische Haut:
Forscher: Damit kommen wir der Berührungsempfindlichkeit organischer Haut einen großen Schritt näher
Auf dem Weg dorthin haben die Sachsen nun wichtige Fortschritte erzielt: Sie integrieren nach dem Vorbild der Natur kleine Sensorhaare in die Roboterhaut, die sogar erkennen können, aus welcher Richtung eine menschliche Berührung naht. Damit komme die elektronische Haut der „realen Berührungsempfindlichkeit organischer Haut einen großen Schritt näher“, heißt es in einer Mitteilung der TU Chemnitz, die dieses Projekt gemeinsam mit dem Leibniz-Institut für Festkörperforschung (IFW) Dresden vorangetrieben hat.
Video (hw): Die Chemnitzer Uni arbeitet schon länger an der Frage, wie Roboter lernen, abrupten menschlichen Bewegungen auszuweichen:

Sensoren und Elektronik in Kunststoffhaut eingebettet
Die elektronische Haut aus Sachsen besteht aus einem biegsamen Polymer-Kunststoff, in den die Forscher Annäherungs-Sensoren und andere elektronische Bauelemente integrieren – ähnlich den Nerven und Sinneszellen einer natürlichen Haut. Ihr neuester Coup sind künstliche Härchen, an deren Wurzeln sich Magnetfeldsensoren befinden. Diese winzig kleinen „Anisotropischen magnetoresistiven Sensoren“ (AMR) können Veränderungen im Magnetfeld besonders präzise und dreidimensional erfassen. Die Idee dabei: Wenn sich nun die künstlichen Haare auf der Roboterhaut in die eine oder andere Richtung verbiegen, weil zum Beispiel ein Mensch mit seiner Hand gerade dem Roboter eine Schraube oder ein Bauteil herüberreichen will, dann registriert der Sensor diese kleinen Richtungsänderungen, noch bevor die Menschenhand in der nächsten Millisekunde die Roboterhand berührt. Der Roboter kann dann rechtzeitig seine eigenen Bewegungen verlangsamen, stoppen oder Federfunktionen aktivieren, damit der menschliche Kollege keine blauen Flecken von der Stahlhand davonträgt.
Prof. Dr. Oliver G. Schmidt (l.), Christian Becker (M.) und Dr. Daniil Karnaushenko (r.) präsentieren einen neuen Ansatz, um mit Mikro-Origami Magnetsensoren für eine künstliche Roboterhaut zu falten. Fotos/Collage: Jacob Müller/Christian Becker (privat/Dr. Daniil Karnaushenko (Leibniz IFW) / Jacob Müller
Mit Mikro-Origami zurechtgefaltet
Hergestellt haben die Wissenschaftler aus Chemnitz und Dresden diese kleinen Sensoren mit der sogenannten Mikro-Origami-Technik. Dabei werden zunächst die sensorischen und elektronischen Bauelemente zweidimensional erzeugt und dann das biegsame Trägermaterial wie bei der japanischen Papiertechnik zusammengefaltet. Mit dieser Methode passen viele mikroelektronische Komponenten auf engsten Raum mit Geometrien, die man mit konventionellen Mikrochip-Herstellungsverfahren nicht realisieren kann, hieß es von der Uni. „Mikro-origamische Verfahren wurden vor mehr als 20 Jahren erstmals entwickelt“, erklärte Mikroorigami-Guru Prof. Oliver G. Schmidt von der TU Chemnitz, der damit in der Vergangenheit bereits steuerbare Mikroroboter und andere Miniaturgeräte realisiert hat. „Es ist wunderbar zu sehen, wie sich das volle Potenzial dieser eleganten Technologie nun für neuartige mikroelektronische Anwendungen nutzen lässt.“ Ähnlich sieht das Doktorand Christian Becker aus der Schmidt-Forschungsgruppe: „Solche Sensorsysteme sind mit konventionellen Methoden der Mikroelektronik extrem schwer herzustellen.“
Video (TUC) vom Origami-Prozess:
Auch als Hautimplantat für Verletzte denkbar
Wenn derartige elektronische Häute künftig serienreif werden, würde davon nicht allein die Kobotik profitieren: Denkbar wäre zum Beispiel auch, Menschen nach schweren Verbrennungen solch eine künstliche Haut zu implantieren. Auch für eine körpernahe medizinische Sensorüberwachung von Patienten könnte sich die Technologie eignen.
Autor: Heiko Weckbrodt
Quellen: TUC, Oiger-Archiv
Wissenschaftliche Publikation:
C. Becker et al. A new dimension for magnetosensitive e-skins: active matrix integrated micro-origami sensor arrays. Nat. Comm. 13, 2121 (2022).
DOI: https://doi.org/10.1038/s41467

Ihre Unterstützung für Oiger.de!
Ohne hinreichende Finanzierung ist unabhängiger Journalismus nach professionellen Maßstäben nicht dauerhaft möglich. Bitte unterstützen Sie daher unsere Arbeit! Wenn Sie helfen wollen, Oiger.de aufrecht zu erhalten, senden Sie Ihren Beitrag mit dem Betreff „freiwilliges Honorar“ via Paypal an:
Vielen Dank!
Du muss angemeldet sein, um einen Kommentar zu veröffentlichen.