
Ein Team vom „Smart Ocean Technologies“ (SOT) experimentiert mit einem Unterwasser-Roboter. Foto: Fraunhofer IKTS / SOT
Fraunhofer-Keramikinstitut IKTS aus Dresden kitzelt aus Akkus die Missionsreserven heraus
Dresden/Rostock, 9. September 2021. Mit modernen Keramiksensoren wollen Fraunhofer-Forscher aus Dresden und Rostock gemeinsam mit Partnern die Akkumulatoren von Unterwasser-Robotern aufwerten. Derartige kabelgesteuerte Roboter sind immer häufiger und länger im Einsatz: Sie inspizieren Bohrinseln, warten Unterwasser-Gasleitungen, suchen nach Rissen an Windkraftwerken auf offener See oder kartografieren die Fauna und Flora am Meeresgrund. Ein besseres Batteriemanagement soll nun die Einsatzkosten senken und dafür sorgen, dass diese „Unmanned Underwater Vehicles“ (UUV) länger tauchen können. Projektkoordinator ist die interdisziplinäre Fraunhofer-Forschungsgruppe für „Smart Ocean Technologies“ (SOT) in Rostock. Die Sensortechnik steuert das „Institut für Keramische Technologien und Systeme“ (IKTS) aus Dresden bei.
Wertvolle Tauchstunden dazugewinnen
„Wenn es uns gelingt, die Einsatzkosten um zehn Prozent zu senken und die Tauchgänge um ein paar Stunden zu verlängern, wäre das ein großer Fortschritt“, betont IKTS-Wissenschaftler Dr. Lars Schubert. Durch das Projekt erhoffen sich die Forscher neue Erkenntnisse über die Entladevorgänge in der Batterie auf der Zellebene und über die inneren Alterungsprozesse der Stromspeicher. „Wir möchten mehr darüber lernen, wie lange solch ein Akku halten kann.“
1000 Meter unter der Meeresoberfläche
Denn die Energiespeicher der Unterwasser-Roboter müssen unter weit schwierigeren Umweltbedingungen funktionieren als beispielsweise Elektroauto-Akkus: Die meisten UUVs können bis zu einen Kilometer tief tauchen, wo Kälte und hoher Wasserdruck die Technik stark beanspruchen. Auf jedem Quadratzentimeter lastet hier über Stunden, manchmal sogar über Wochen hinweg ein Druck, der dem Gewicht eines Mittelklassewagens entspricht. Ausgesetzt und ferngesteuert werden die Tauchroboter meist von Schiffen spezialisierter Dienstleister. Der damit verbundene Aufwand hat allerdings seinen Preis: Einsatzkosten um die 100.000 Dollar pro Tag und Schiff sind keine Seltenheit. Solche Roboter-Wartungen sind jedoch unabdingbar, damit Pipelines, Offshore-Plattformen, Unterwasser-Datenkabel und andere kritische Infrastrukturen im Meer zuverlässig funktionieren.
20 % Missionsreserve eingerechnet
Damit die Roboter gar nicht erst auf dem Meeresgrund verloren gehen oder wegen leerer Akkus eine teure Wartungsmission mit einem Notauftauch-Manöver abbrechen müssen, rechnen die Missionsplaner heute meist eine Sicherheitsreserve von 20 Prozent der Akku-Kapazität ein. Das heißt, wenn ein UUV beispielsweise einen Lithium-Ionen-Akku mit 100 Kilowattstunden (kWh) an Bord hat, kann er davon nur 80 kWh effektiv für die Mission nutzen. Zwar ist der Ladezustand von Akkus auch heute schon messbar – aber nur summarisch und vergleichsweise ungenau über die Spannung und Stromstärke der gesamten Batterie. Ein Ziel des SOT-Projektes ist es daher, die Entladung der einzelnen Energiezellen so präzise zu ermitteln, dass nur noch zehn Prozent Akku-Reserve nötig sind.
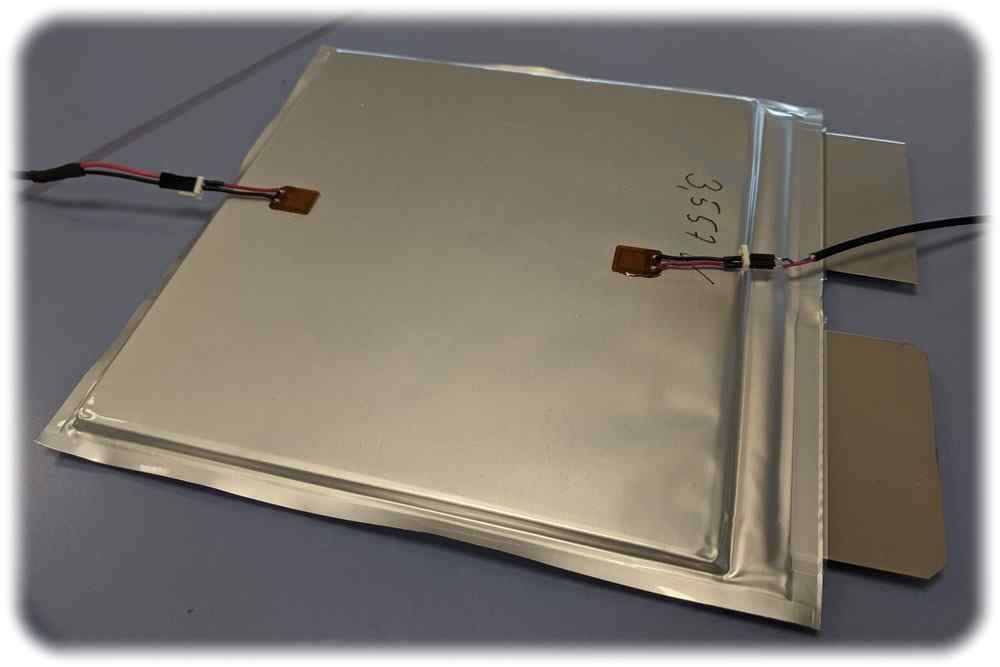
An dieser Akkuzelle überwachen piezoelektrische Sensoren zur den Ladezustand. Foto: Fraunhofer IKTS
Sensorwandler messen per Ultraschall, wie elastisch jede Batteriezelle ist
Dafür kleben Lars Schubert und sein Team auf jede Akku-Zelle kleine keramische Sensoren. Dabei handelt es sich um piezoelektrische Bauelemente. Sie schwingen, wenn man eine Spannung von außen anlegt. Umgekehrt wandeln sie mechanische Bewegungen in messbare elektrische Signale. Um nun die „Gesundheit“ und die Entladevorgänge der einzelnen Zellen zu messen, legen die Ingenieure eine kleine Spannung von 5 Volt an. Dann lesen sie aus, wie gut der piezoelektrische Sensor auf der Zelloberfläche schwingt. Denn wenn sich die Zelle entlädt, verändert sich ihre Härte – und das lässt sich messen. Wenn die Untersuchung noch genauer ausfallen soll, kleben die Forscher zwei Sensoren auf jede Zelle auf. Dann können sie Ultraschall-Impulse im Akku hin und her wandern lassen und so klarer ermitteln, wie elastisch – sprich: wie gut aufgeladen – jede Zelle noch ist.
Minilab versinkt im Rostocker Hafen
Nach Trockentests im Labor ist im nächsten Schritt geplant, die neue Sensortechnik auch unter Wasser zu erproben: in einem „Minilab“, das die Forscher voraussichtlich zum Jahresende 2021 im Rostocker Hafenbecken installieren.
Die Roboterschlangen warten schon
Sind dann im Unterwasserlabor die Zusammenhänge zwischen tatsächlicher Entladung auf Zellebene und der summarisch gemessenen Entladung des ganzen Akkumulator genauer analysiert, fließen diese Erkenntnisse in ein exakteres Batteriemanagement ein. Durch spätere Kostensenkungen könnte es sich in Zukunft womöglich sogar lohnen, piezoelektrische Sensoren serienmäßig in UUV-Energiespeicher einzubauen.
Denn die Zukunft birgt schon neue Herausforderungen für die Unterwasser-Robotik: Internationale Technologieschmieden arbeiten bereits an – leider relativ energiehungrigen – Roboterschlangen, die wie in einem Science-Fiction-Film autonom durch die Meere gleiten und unterwegs Schiffe, U-Boote oder Windkraft-Plattformen inspizieren und reparieren. Auch viele Fraunhofer-Partner haben verstärktes Interesse daran, aus ihren Unterwasser-Robotern noch die eine oder andere Kilowattstunde Reserve herauszukitzeln.
Autor: hw
Quelle: IKTS

Ihre Unterstützung für Oiger.de!
Ohne hinreichende Finanzierung ist unabhängiger Journalismus nach professionellen Maßstäben nicht dauerhaft möglich. Bitte unterstützen Sie daher unsere Arbeit! Wenn Sie helfen wollen, Oiger.de aufrecht zu erhalten, senden Sie Ihren Beitrag mit dem Betreff „freiwilliges Honorar“ via Paypal an:
Vielen Dank!
Du muss angemeldet sein, um einen Kommentar zu veröffentlichen.