
Die Prototypen-Fahrplattform der TU Dresden für den Elwobot. Von Partnern und Kunden um Sensoren und Aufbauten ergänzt, soll dieses Chassis als Basis für autonom agierende künstliche Plantagenhelfer dienen. Foto: Heiko Weckbrodt
ELWOBOT aus Dresden kurvt künftig durch Plantagen und pflegt den Wein – der Mensch schaut zu
Dresden, 2. August 2017. Noch zu DDR-Zeiten haben sich viele Geringverdiener ein Zubrot als Erntehelfer auf Erdbeerfeldern und Obstplantagen verdient. Heute aber wollen nur noch wenige für die paar Kröten die Rücken krumm machen. Und mal abgesehen vom wachsenden Problem, dafür überhaupt noch Personal zu finden: Warum eigentlich sollen Menschen überhaupt noch solche mühseligen Sklaven-Arbeiten auf Plantagen erledigen, da es doch Roboter gibt?
Elwobots kümmern sich vernetzt um Obstbäume und Weinstauden
Diese Frage haben sich auch die Landmaschinenbauer der TU Dresden gestellt. Seitdem tüfteln sie mit Kollegen aus den Hochschulen Osnabrück und Geisenheim, der sächsischen Maschinenbaufirma „Raussendorf“ aus Obergurig und weiteren Partnern an selbstständig agierenden Erntehelfern aus Stahl. Nun haben sie solch einen autonomen „ELektrischen Wein- und ObstroBOTer“ (ELWOBOT) vorgestellt. Per Internetfunk mit weiteren Robotern und den menschlichen Kontrolleuren vernetzt, sollen die ELWOBOTs in Zukunft die Bäume und Sträucher von Obstplantagen wässern und besprühen, vor dem Winter schützenden Rindenmulch auslegen und – in fernerer Zukunft – im Sommer auch Wein ernten. In Testgärten hat der vierrädrige Geselle bereits erfolgreich auf Probe gearbeitet.

Zwischen dem Gestern und dem Morgen: Schon zu DDR-Zeiten, als es noch das Fortschritt-Kombinat mit seinen Großfabriken für Mähdrescher, Traktoren und andere Landmaschinen in Sachsen gab, konzentrierte die TU Dresden ihre Agrartechnik-Experimente an der Südhöhe in Dresden. Im Vordergrund steht ein mit moderner Steuerungstechnik ausgerüsteter „New Holland“-Traktor, an dem die Ingenieure neue Bodenbearbeitungs- und Ernte-Anhänger ausprobiert. Foto: Heiko Weckbrodt
Zum Weiterlesen:
Landwirtschaft 4.0: Enteschwarm zieht über die Felder
„Wollen den Menschen nicht aus Plantagen und Feldern herausautomatisieren“
„Unser Ziel ist es allerdings nicht, den Menschen aus Plantagen und Feldern herauszuautomatisieren“, betonte Professor Thomas Herlitzius, der an der TU den Lehrstuhl für Agrarsystemtechnik leitet. „Nach meiner Überzeugung wird der Bediener immer Teil des Gesamtsystems bleiben, weil sich bestimmte menschliche Leistungen und Entscheidungen nur schwer automatisieren lassen.“

Für den Menschen kein Problem, für den Roboter eine Herausforderung
Das ist auch ein Grund, warum die TU-Agrartechnikingenieure dem ELWOBOT erst später beibringen wollen, Kirschen oder Weintrauben zu pflücken – diese so simpel erscheinende und oft schlecht bezahlte Arbeit ist für künstliche Hände nämlich eine große Herausforderung. Die Experten von der Dresdner Südhöhe haben sich erst mal darauf konzentriert, ihrem bäuerlichen Roboter ganz elementare menschliche Fertigkeiten beizubiegen: Dass er sich wie ein geborener Agrarier auf holprigen Gartenböden mühelos bewegen kann und sich dabei nicht im Gestrüpp verfranzt.
Video: Erste Modellversion des Elwobots:

Sensoren-Phalanx hilft Elwobot bei der Orientierung
Dafür haben die Osnabrücker Kollegen ihm eine Satellitennavigation für die Groborientierung eingepflanzt. Eine Phalanx aus Laser-, Ultraschall- und anderen Sensoren kümmert sich dann um die Feinorientierung zwischen den Sträuchern und Bäumen. Diese Sensoren sollen auch erkennen, ob ein Strauch viele grüne Blätter hat oder wenige, ob ein Obstbaum krank ist oder nicht. In einer späteren Ausbaustufe könnte der ELWOBOT dadurch auch entscheiden, ob die eine Pflanze mehr Wasser braucht, der nächste Strauch dagegen vielleicht eher chemische Hilfe gegen Käfer, Würmer und andere Schädlinge.
Panzer-Konzept wieder verworfen
Das alles klingt eigentlich einfach, ist aber jenseits der kontrollierten Umgebungen hochautomatisierter Fabriken eine echte Herausforderung für die Robotiker: „Allein am Fahrchassis haben wir bisher sieben Jahre gearbeitet“, erzählt Prof. Herlitzius. Anfangs habe es der Lehrstuhl mit sechs Rädern versucht: Der ELWOBOT sollte sich wie ein Panzer oder Mars-Rover fortbewegen. In der bäuerlichen Praxis allerdings funktionierte das kaum: Mal überlenkte der Roboter, dann wieder wühlte er nur den unebenen Böden auf oder beschädigte Grasnaben. Da hieß es: Zurück ans Reißbrett! Danach hatte der 1,5 Tonnen schwere Erntehelfer nur noch vier einzeln durch E-Motoren angetriebene Räder. Seither bewegt er sich mit einer Wendigkeit, die man sich als Einparkhilfe fürs Auto nur wünschen würde.
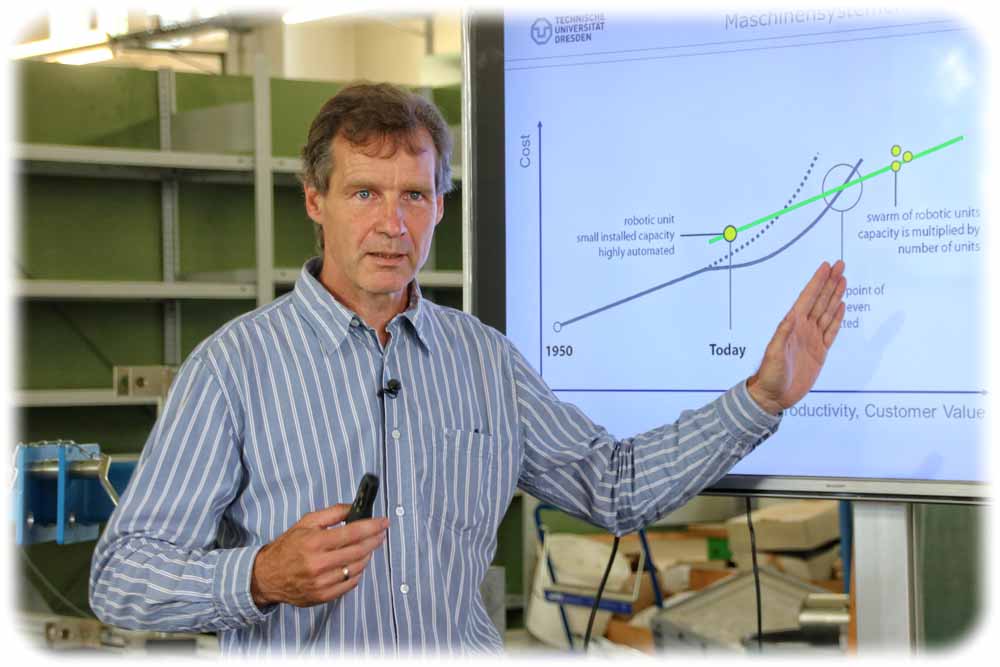
In der Landtechnik sieht Professor Thomas Herlitzius vom Lehrstuhl für Agrarsystemtechnik der TU Dresden neue Trends: Statt Mähdrescher, Traktoren und andere Feldmaschinen immer breiter, schneller und schwerer zu machen, geht der Trend in der Agrarwirtschaft zu Hightech: zu Digitalisierung, autonomen Fahrzeugen und ernteschwärmen. Foto: Heiko Weckbrodt
Diesel oder Elektro?
Auch von der Idee, den Roboter gleich vollelektrisch fahren zu lassen, mussten sich die Agrartechnik-Entwickler vorerst verabschieden: „Fossile Treibstoffe wie Diesel speichern nun mal immer noch 1000 Mal mehr Energie wie heutige Batterien mit dem gleichen Volumen“, erklärt Thomas Herlitzius. Daher haben die Dresdner ihrem ELWOBOT erstmal einen kleinen Dieselmotor aus einem Smart-Auto spendiert, der als Generator den Strom für alle Antriebsaggregate und Systeme liefert. Am elektrischen Ziel halten die Ingenieure aber fest: Wenn Batterien mit mehr Energiedichte auf den Markt kommen, wird umgerüstet.
Autor: Heiko Weckbrodt

Ihre Unterstützung für Oiger.de!
Ohne hinreichende Finanzierung ist unabhängiger Journalismus nach professionellen Maßstäben nicht dauerhaft möglich. Bitte unterstützen Sie daher unsere Arbeit! Wenn Sie helfen wollen, Oiger.de aufrecht zu erhalten, senden Sie Ihren Beitrag mit dem Betreff „freiwilliges Honorar“ via Paypal an:
Vielen Dank!