
Mit seinen sechs Füßen kommt der Schreit-Harvester in unwegsamen Wäldern voran. Visualisierung: TU Dresden
Sächsiche Forscher wollen durch Abkehr vom Fahrprinzip Waldböden schonen
Tharandt, 20. September 2013: Ein wenig sieht er schon wie einer jener imposanten Schreit-Roboter aus den „Starwars“-Filmen aus: Der neue Holzernter (Harvester), den TU-Forscher aus Tharandt und Dresden jetzt für die morastigen Wälder Norddeutschland und des Baltikums entwickelt haben. Statt auf Reifen oder Ketten stampft dieses Forstgerät auf künstlichen Füßen durch den Wald, um Bäume en masse zu fällen, zu entasten und zurechtzuschneiden. Damit kommt er in unwegsamen Gelände nicht nur besser voran als seine rollenden Geräte-Kollegen, sondern schont auch den Waldboden.

Prof. Jörn Erler. Foto: TUD

Erfinder Christian Knobloch. Foto: TUD
Skandinavier dominieren Markt für Forstmaschinen
„In der Forstwirtschaft wird der Markt heute von Maschinen aus Skandinavien dominiert“, erklärt Projektleiter Prof. Jörn Erler vom TU-Institut für Forstnutzung und Forsttechnik in Tharandt. „Diese Harvester sind sehr solide Geräte, wiegen aber meist 16 bis 25 Tonnen.“ Diese schweren Waldverzehrer sind allerdings die gefrorenen Waldböden Skandinaviens gewöhnt oder die trockenharten Sommerböden in Frankreich und Spanien. „Vor allem in Ostsee-Nähe sind die Waldböden in Deutschland, Polen und im Baltikum aber oft aufgeweicht, da fahren sich solche schweren Fahrzeuge schnell fest“, erklärt Erler. „Die Alternative ist ein Kettenantrieb, aber der zerstört den Boden.“
TU-Student dachte sich Schreit-Prinzip für Diplomarbeit aus
Daher hatte sich der Dresdner Maschinenbau-Student Christian Knobloch in seiner Diplomarbeit an der TU ein neues Fortbewegungs-Prinzip ausgedacht: Seine Fäll-Maschine ist auf einer faltbaren Brücke mit zwei Tripod-Beinen mit je drei Füßen montiert. Darauf bewegt sie sich sägend von Baum zu Baum. Ist das Ende der Schiene erreicht, stellt sich der Schreit-Ernter auf einen Fuß, faltet die Brücke, dreht sie nach vorn, entfaltet sie und setzt wieder mit dem anderen Dreier-Bein auf.
„So entsteht nur eine Laufspur ähnlich der eines Pferdes auf dem Waldboden, der dadurch nicht zerwühlt wird“, erklärt Erler, der sich den pfiffigen Studenten in sein Institut in Tharandt geholt hat. Seitdem haben die Forscher dort das Verfahren weiter verfeinert und nun einen funktionsfähigen Prototypen gebaut.
Mobile Seilbahn sorgt für Holztransport
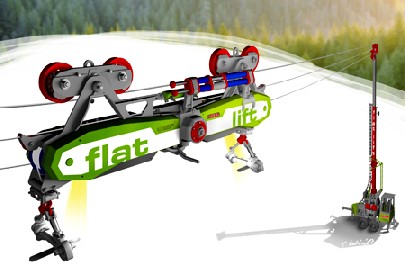
Der Seilkran schwebt die Holzstücke aus dem Wald aus. Visualisierung: TUD
Da ihr Harvester freilich in freiem Gelände nur langsam vorankommt, ersannen sie für ihn noch einen künstlichen Kuli, der die gefällten, entasteten und in Stücke gesägten Bäume rasch abtransportiert. Dafür modifizierten sie das aus den Bergen bekannte Seilkranprinzip: Ein Stützwagen richtet am Waldrand einen Mast auf, ein zweiter, rund 16 Meter hoher Mast wird in den Wald gezogen und dort mit Seilkraft aufgerichtet. Ein neuentwickelter Tragwagen greift sich dann von dieser Seilbahn aus die Holzstücke und schwebt sie in lichter Höhe aus. Bäume werden durch den Seilzug nicht angegriffen, auch erden Schleifspuren auf dem Boden vermieden.

Der Portalharvester in Aktion. Foto: TUD
Premiere für Schreit-Harvester in Meck-Pomm
Entwickelt hatten die TU-Tüftler die Technik gemeinsam mit fünf Firmen aus der freien Wirtschaft, um die Machbarkeit für spätere Serienmodelle sicher zu stellen. Interesse an einer Nutzung haben bereits die Forstverwaltungen in Brandenburg und Mecklenburg-Vorpommern angemeldet.
Am 1. und 2. Oktober wollen die Tharandter Tüftler den Schreit-Ernter und dessen Seilbahn in einem Wald in Meck-Pomm erstmals vor einem breiterem Publikum in Aktion zeigen. Etwa ein Jahr werden dann noch die Feldversuche und Korrekturen dauern, glaubt Erler – 2014 werde die neuartige Technik wohl marktreif sein. Heiko Weckbrodt

Ihre Unterstützung für Oiger.de!
Ohne hinreichende Finanzierung ist unabhängiger Journalismus nach professionellen Maßstäben nicht dauerhaft möglich. Bitte unterstützen Sie daher unsere Arbeit! Wenn Sie helfen wollen, Oiger.de aufrecht zu erhalten, senden Sie Ihren Beitrag mit dem Betreff „freiwilliges Honorar“ via Paypal an:
Vielen Dank!
1 Kommentare